An Exoskeleton Glove Mechanism with Haptics Feedback
This ongoing research focuses on the following aims:
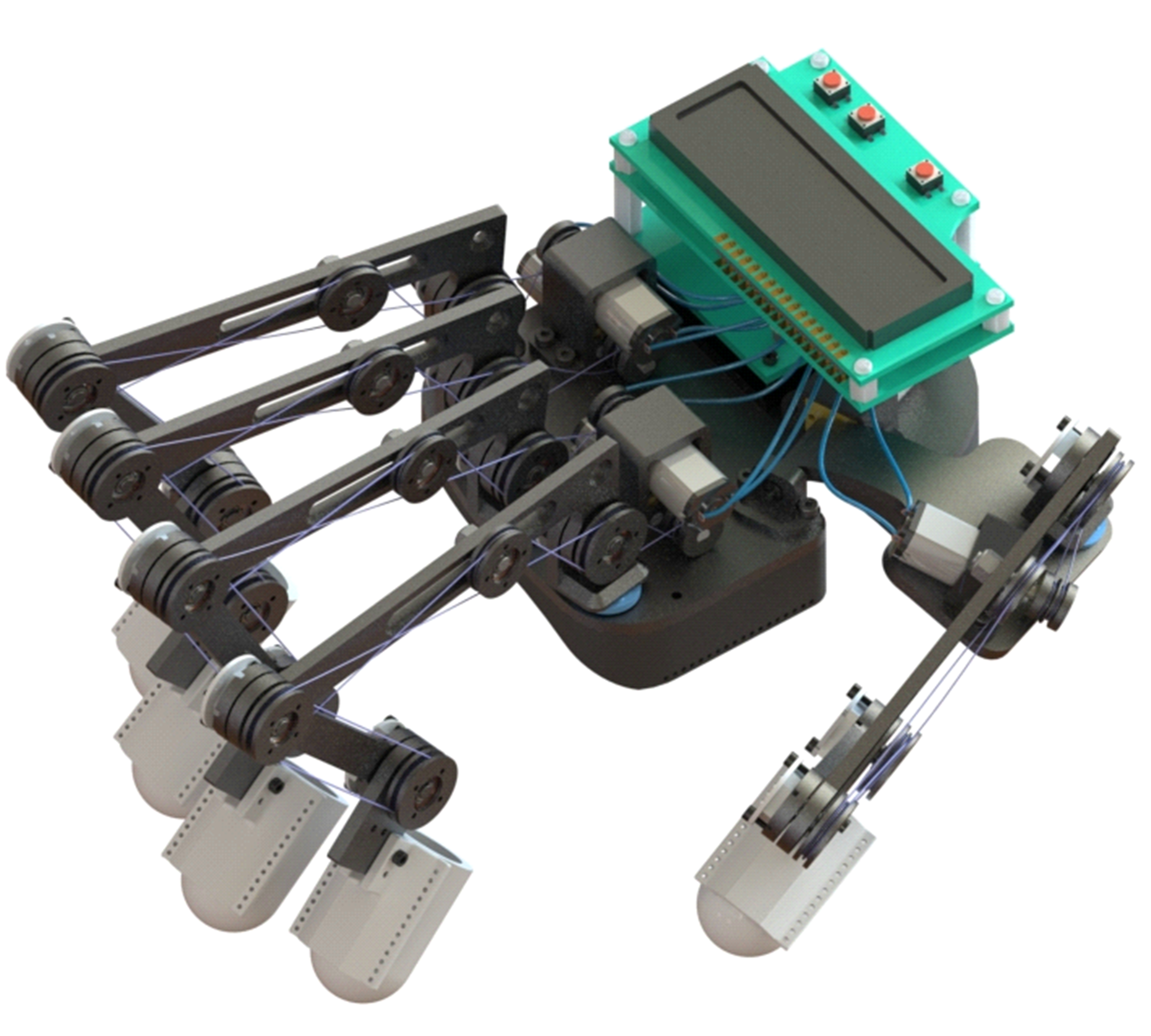
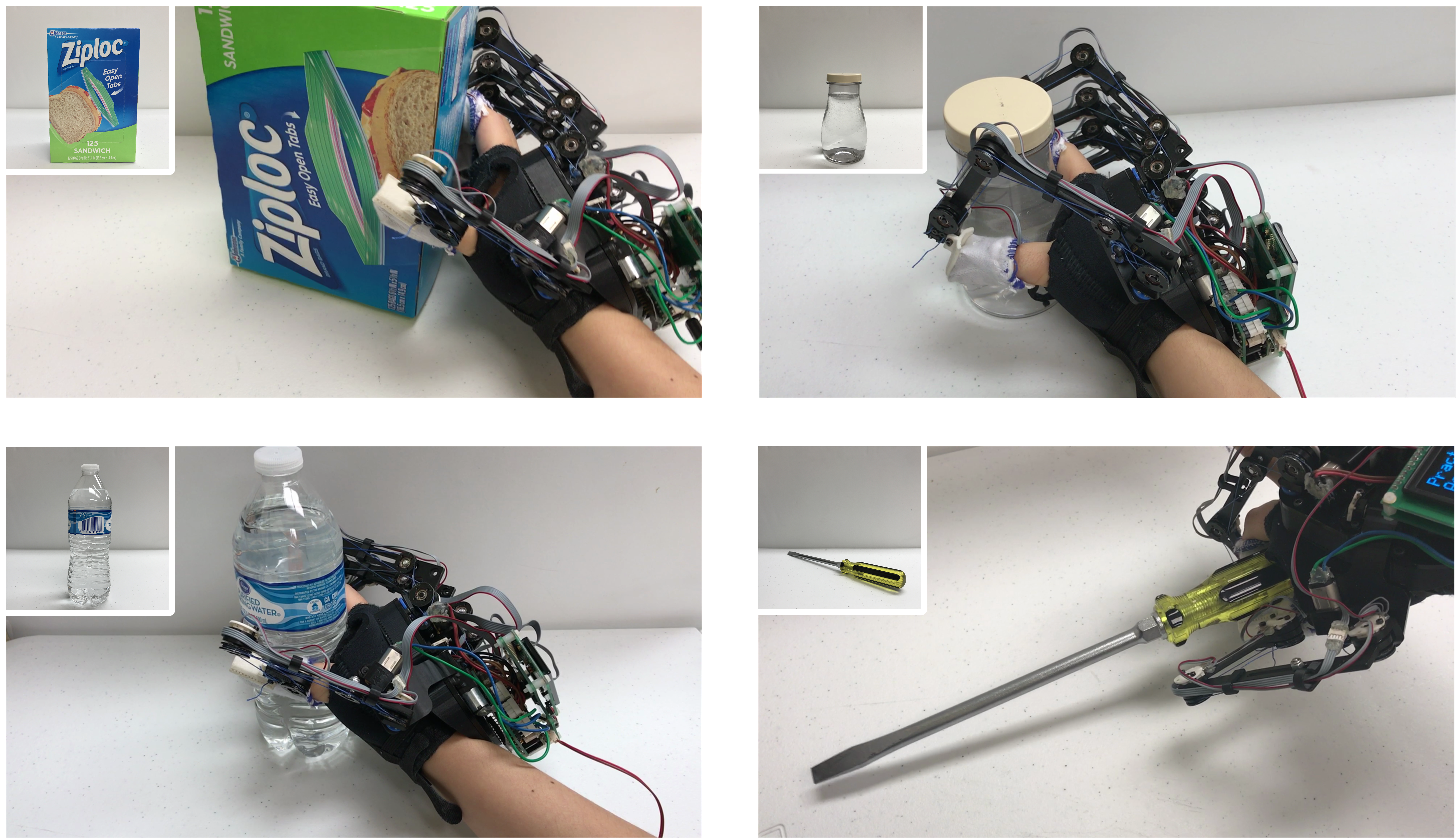
(1) Development of novel design of a haptic glove mechanism that is a lightweight, portable and self-contained mechatronic system that fits on a bare hand and provides haptic force feedback to each finger of the hand without constraining their movement.
(2) Development and implementation of novel on-board wireless real-time sensor/actuator control interfaces for HRI/HCI applications.
(3) Optimization of the mechanical design of the in haptic glove for the purpose of enhancing the workspace of the mechanism and maximizing the force transmission ratio of the link mechanism.
(4) Development of a novel method to build an accurate human hand model which includes finger length and joints location with this glove.
(5) Applications include: rehabilitation for hand orthosis, medical training, and mobile robot teleportation using this haptic glove with force feedback to augment telepresence.
As a force feedback user interface, a haptic glove mechanism should be user-friendly and effective in providing force feedback to the user's fingers. In terms of its user-friendly characteristics, it should be easy to wear, lightweight, compact, and harmless to the fingers. In terms of effectiveness, it should provide a real and natural feeling to the user ranging from a gentle touch/grasp up to the ability to match the maximum force output of the human hand without constraining the finger movement. However, most existing haptic gloves are either too complicated or ineffective to provide a natural force feeling without some kind of design compromise.
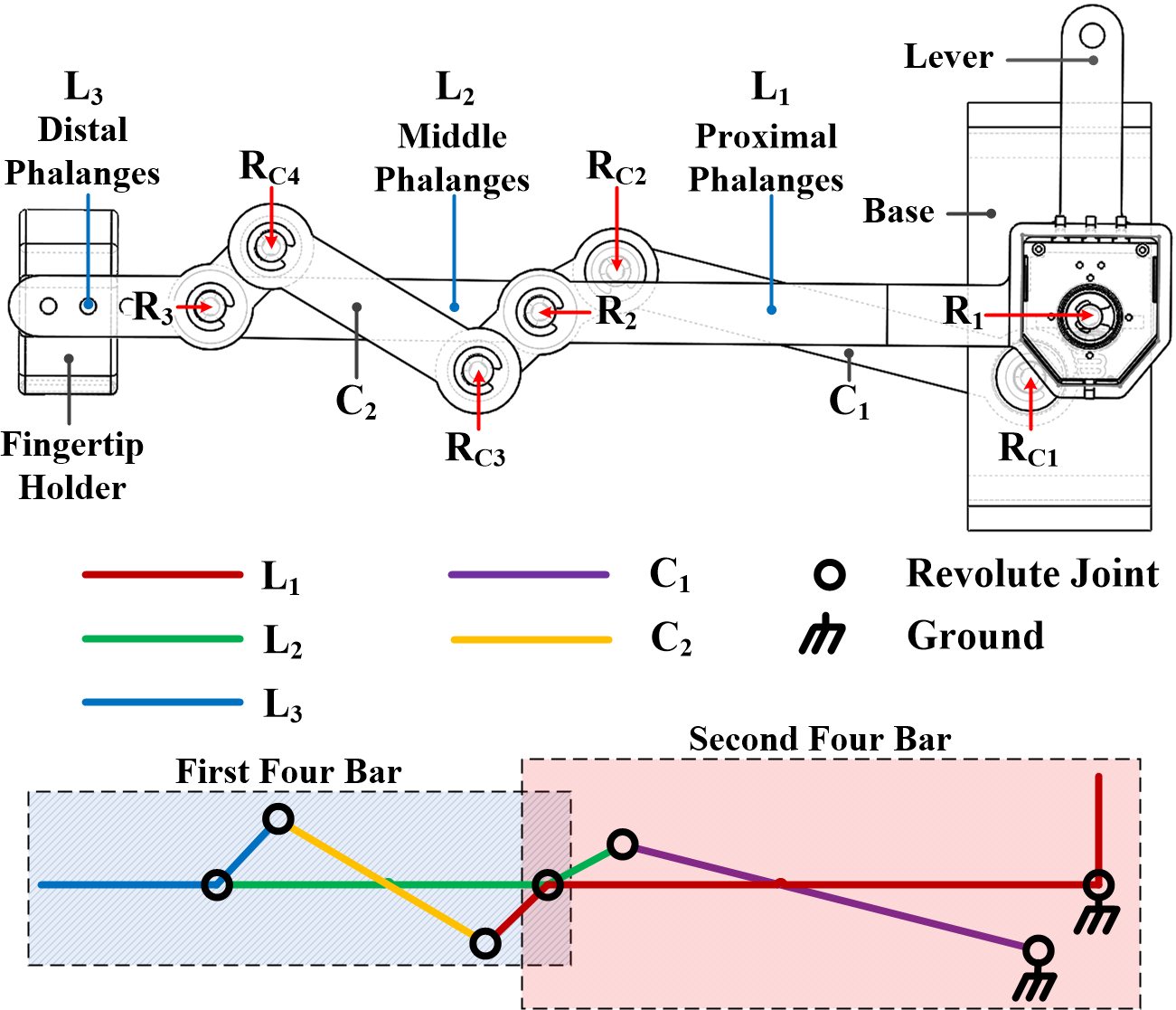
An exoskeleton glove with a rigid coupling mechanism has been designed to reduce the actuator burden to one per finger. The kinematic coupling has been optimized to best reproduce the natural motion of each finger. The entire linkage system is able to lie in the space between fingers. The linkage system is composed of two sequential four-bar mechanisms as shown in Fig. 5. Force is applied by an SEA to the Lever which causes simultaneous motion in all of the finger joints.