A Mechatronics Measurement System for Ship Air Wake Studies with UAVS
In collaboration with Prof. Murray Snyder and the US Naval Academy (Annapolis, MD), this ongoing research focuses on the following aims:
(1) Development of Ship Air Wake measurement methods using instrumented UAVs and automated data post-processing.
(2) Development of algorithms for pilot input compensation using Back-Propagation Neural Networks (BPNN).
(3) Development of Telemetry System for real-time Air Wake measurement and processing (during flight ops).
The developed system uses a low cost UAV (i.e., RC helicopter) that is flown in the lee of a cruising naval ship and its attitude disturbances are monitored with an onboard IMU (Inertial Measurement Unit). Concurrently, the relative position of the UAV is determined by comparing the GPS derived position of the UAV with that of a reference position on the ship. Fig. 1 shows the ship and the RC helicopter used in the experiments. A USB powered pilot input receiver module was developed to read pilot inputs from the radio controller in the form of PWM signals. Fig. 2 shows the pilot input receiver module.
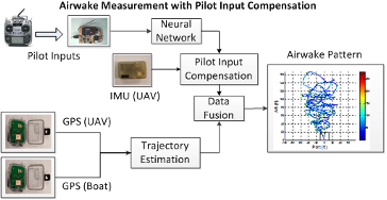
During underway flight operations, the ship's craft master attempts to keep the ship under the same relative wind over deck based upon the reference anemometer. The developed system uses a Back Propagation Neural Networks (BPNN) to predict the component of IMU readings arising from pilot inputs alone. This predicted IMU data is subtracted from the actual measured data to obtain the actual disturbance due to air wake. Fig. 3 shows overall architecture of the proposed system for air wake measurement.
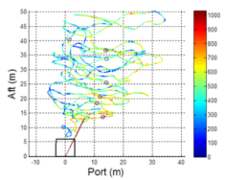
IMU data and pilot inputs are recorded during these flights to calculate air wake and overlaid on the helicopter trajectory. Fig. 4 shows a sample air wake pattern generated from the system where the red regions depict high air wake and the blue color shows regions of low air wake.